Although GPS allow for a high level of positional accuracy, when collecting data in the field, they are often extremely laborious when it comes to data entry. The GPS units have slow processors, and poorly responsive screens. ArcCollector is an application for smartphones that allows for expedited data entry when recording data in the field. It requires a cellphone signal, which may slightly limit its usable range, but its use of the smartphones' hardware allows for intuitive data entry.
Methods:
Before performing data collection, a geodatabase needed to be created. I recorded weather data around campus, and differentiated between points by how exposed the locations were to wind. I created four domains: a coded value domain for exposure, a range domain for temperature, a range domain for wind speed, and a range domain for wind direction. After all of the domains were created, I created a feature class, and assigned the domains to attribute fields. After the feature class was created, I customized its symbology so every exposure level had a different symbol associated with it. Next, I shared the ArcMap document to ArcGIS online so I could collect data in the field.
Performing the data collection with ArcCollector was easy. Attribute entry as performed by typing the values into a form using an on-screen keyboard. I recorded the temperature and wind speed with a Kestrel Anemometer. I used a compass to determine the direction snow was falling, in order to identify the wind direction.
Discussion:
Entering attribute data using ArcCollector was substantially easier than using the Topcon Tesla or a Trimble Juno. The positional accuracy of ArcCollector was rather low, as one of the points was located in a building.
Results:
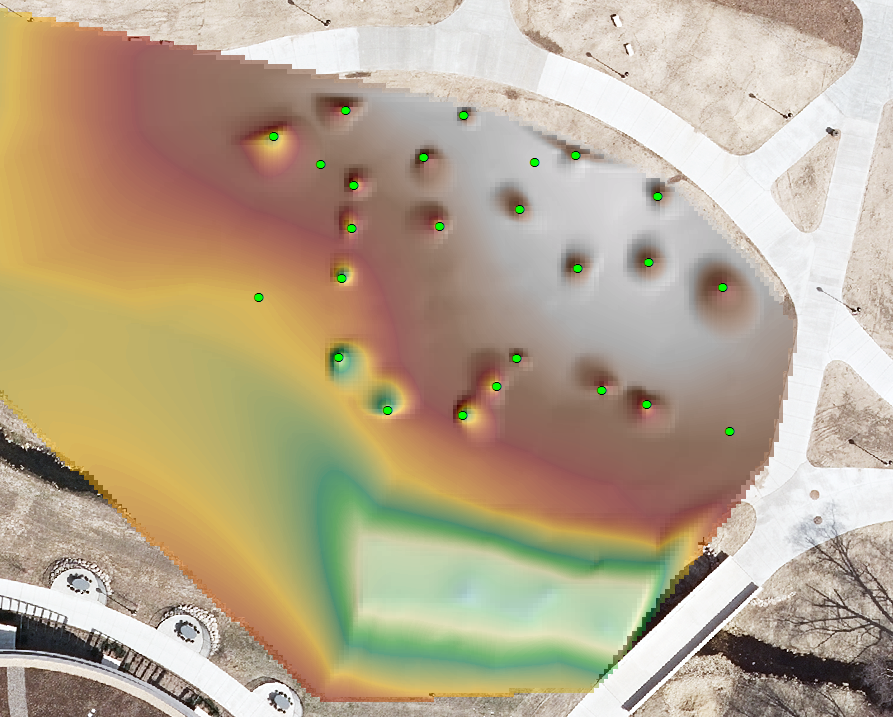
After the collection was complete, I interpolated the wind speeds and wind directions between the points using the Nearest Neighbor method. I then used the "raster domain" tool to create a polygon layer of the extent of the interpolated surfaces. Next, I used the "erase" tool with a polygon feature class of the buildings on campus to eliminate the buildings' areas from the extent feature class. The "create random points" tool was used to create 100 random points within this newly erased polygon feature class. I used the "extract multi values to points" tool to assign the wind speed and direction rasters' values to the random points. I then symbolized the points as arrows, with proportional sizes related to their wind speeds. I used an advanced option to rotate the arrows to the value extracted from the wind direction raster (Figures 1,2).
 |
| Figure 1: Mapped wind values with the collected points. |
 |
| Figure 2: Wind values mapped with ArcScene, to see the interaction between wind and buildings. |
Conclusion:
ArcCollector is not good at collecting points in situations where positional accuracy is important. However, it allows for extremely fast entry of attribute data, a quality that increases its desirability, specifically as the number of entered attributes per point increases.
Sources:
http://en.acolita.com/how-to-create-a-wind-map-in-arcgis.html